|
Type: |
|
|
Address: |
RMC75: n/a RMC150: n/a RMC200: Position/Velocity Input: %MDn.38, where n = 256 + the axis number Primary Acceleration Input: %MDn.36, where n = 256 + the axis number Secondary Acceleration Input: %MDn.96, where n = 256 + the axis number |
|
System Tag: |
Primary Input: _Axis[n].ActAccControl Secondary Input: _Axis[n].SecActAccControl where n is the axis number |
|
How to Find: |
Axes Status Registers Pane, All tab, Feedback section |
|
Data Type: |
|
|
Units: |
pu/sec2 |
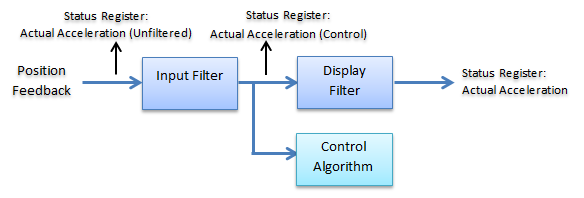
Description
The Actual Acceleration (Control) value is the acceleration feedback with the control filter applied. This value is used by the control algorithm for the PID calculations. The value may be filtered again by the display filter, and the final filtered value is given by the Actual Acceleration status register.
The Actual Acceleration (Control) value is valuable for detailed troubleshooting because it shows the exact value that the control-algorithm is operating on, whereas the commonly used Actual Acceleration is typically a filtered value that will differ slightly from the Actual Acceleration (Control) value.
See Actual Acceleration and Filtering topics for more details.
See Also
Actual Acceleration | Actual Acceleration (Unfiltered) | Filtering
Copyright © 2026 Delta Computer Systems, Inc. dba Delta Motion